Hướng dẫn cài Delta CP2000 chạy PID
CÀI ĐẶT BIẾN TẦN DELTA CP2000 ĐIỀU KHIỂN PID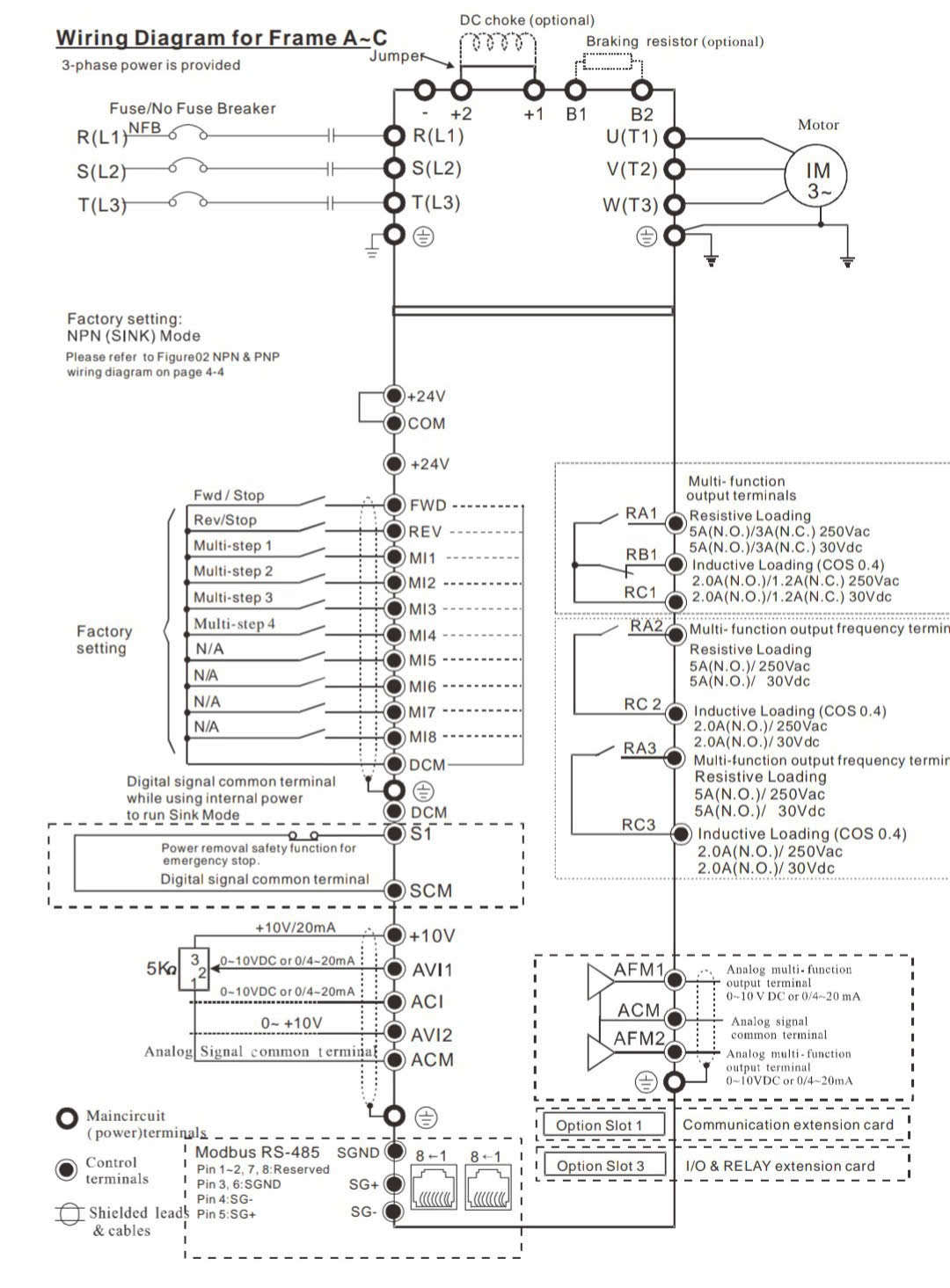
Đấu nối điều khiển +24V – ACI chân cảm biến áp suất 4-20mA
ACM đấu chung với DCM
00-02 = 9 Reset
00-04 = 10 hiển thị giá trị hồi tiếp PID00-25 = 0162h hiển thị giá trị áp suất bar
00-26 = 10 (áp suất tối đa của sensor) (10bar)
00-20 = 0 tăng giảm setpoint PID bẳng bàn phím biến tần
00-21 =1 Run biến tần qua công tắc ngoài
01-12 = 10s thời gian tăng tốc
01-13 = 10s thời gian giảm tốc
08-00 = 1 (bật tính năng PID hồi tiếp âm)
03-01 = 5 (chân ACI nhận tín hiệu PID)
02-35 = 1 (chạy lại khi cấp điện)
F giá trị áp suất đặt duy trì (ví dụ =6 bar)
B giá trị áp suất thực tế
H tần số motor thực tế
Cài đặt tần số ngủ khi áp suất đạt tối đa
01-11 tần số duy trì trong thời gian bắt đầu ngủ = 25hz
08-10 tần số ngủ > 01-11 = 26Hz
08-11 tần số thức > 08-10 > 01-11 = 27Hz
08-12 thời gian bắt đầu ngủ = 5 giây
Cài đặt chế độ luân phiên 2 bơm thời gian 6 giờ
12-00 = 1 (luân phiên theo thời gian)
12-01 = 2 (số motor luân phiên)
12-02 = 360 phút (thời gian hoạt động 1 motor)
12-03 = 3 (thời gian trễ khi tăng tốc)
12-04 = 3 (thời gian trễ khi giảm tốc)
12-05 =3 (thời gian trễ khi luân phiên)
12-06 =50hz (tần số khi luân phiên)
Motor 1 : 02-13 = 55 (RA1 – RC1 đóng contactor 1)
Motor 2 : 02-14 = 56 (RA2 – RC2 đóng contactor 2)
Cài đặt chế độ tăng cường/sa thải 2 bơm
12-00= 3 (tăng cường/sa thải)
12-01= 1 (số motor )
12-05 =3 (thời gian trễ khi tăng cường/sa thải)
12-06 =50hz (tần số khi tăng cường/sa thải)
Motor 1 : 02-13 = 55 (RA1 – RC1 đóng contactor 1)